
أسلوب لتخطيط المسارات التكيفية للمركبات ذاتية القيادة
أسلوب لتخطيط المسارات التكيفية للمركبات ذاتية القيادة
في حين أن العديد من المركبات ذاتية القيادة حققت أداءً رائعًا في عمليات المحاكاة أو التجارب الأولية، عند اختبارها في شوارع حقيقية، فإنها غالبًا ما تكون غير قادرة على تكييف مساراتها أو تحركاتها بناءً على تلك الخاصة بالمركبات أو الوكلاء الآخرين في محيطهم. هذا صحيح بشكل خاص في المواقف التي تتطلب درجة معينة من التفاوض، على سبيل المثال، عند التقاطعات أو في الشوارع ذات الممرات المتعددة.
LUCIDGames
محتويات المقالة :
أنشأ باحثون في جامعة ستانفورد مؤخرًا LUCIDGames، وهي تقنية حسابية يمكنها التنبؤ والتخطيط للمسارات التكيفية للمركبات ذاتية القيادة. هذه التقنية ، المقدمة في ورقة منشورة مسبقًا على arXiv ، تدمج خوارزمية تعتمد على نظرية اللعبة وطريقة التقدير.
“بعد التطورات في تقنية القيادة الذاتية التي حدثت خلال السنوات القليلة الماضية، لاحظنا أن بعض مناورات القيادة ، مثل الانعطاف يسارًا عند تقاطع غير محمي، أو تغيير الممرات أو الاندماج في طريق سريع مزدحم، لا يزال يمثل تحديًا للذات قيادة السيارات، في حين أن البشر يمكنهم تنفيذها بسهولة تامة، كما قال سيمون لو كليتش، أحد الباحثين الذين أجروا الدراسة، لموقع TechXplore. “نعتقد أن هذه التفاعلات تنطوي على جزء كبير من التفاوض بين السيارة ذاتية القيادة والسيارات في محيطها.”
السيارات ذاتية القيادة
يستطيع البشر عمومًا معرفة أهداف السائقين الآخرين الذين يقومون بتشغيل المركبات في محيطهم والتفاوض على القرارات، مثل من يذهب أولاً في تقاطع معين. في دراستهم، حاول Le Cleac’h وزملاؤه تكرار هذه القدرة والسلوكيات المعقدة التي تدعمها في السيارات ذاتية القيادة. كان هدفهم العام هو السماح للسيارات ذاتية القيادة بتحديد أهداف المركبات الأخرى في محيطها من أجل التخطيط لمسارات أكثر ملاءمة في سيناريوهات تتضمن درجة معينة من التفاوض.
قال لو كليتش:
“يجمع عملنا بين أداتين أساسيتين، خوارزمية تعتمد على نظرية اللعبة وتقنية التقدير”. “يسمح المكون القائم على نظرية اللعبة للسيارة ذاتية القيادة بالتفكير في التفاعلات مع الوكلاء الآخرين (المركبات والمشاة وراكبي الدراجات وما إلى ذلك) عندما لا تكون أهدافهم متوافقة تمامًا مع هدفها الخاص. جزء التقدير، من ناحية، يسمح للمركبة ذاتية القيادة باكتشاف الأهداف الأساسية للوكلاء الآخرين بسرعة أثناء التفاعل معهم، والتي يمكن أن تكون على سبيل المثال السرعة المطلوبة أو المسار المرغوب أو مستوى عدوانية كل مركبة تتفاعل مع السيارة ذاتية القيادة “.
تم تصميم LUCIDGames
وهي التقنية التي اقترحها Le Cleac’h وزملاؤه ، لتزويد المركبات ذاتية القيادة بالقدرة على تحديد أهداف كل من السيارات والمشاة في محيطهم بسرعة. هذا يسمح لهم بالتنبؤ بما سيفعله هؤلاء العملاء في المستقبل والعمل بأمان حولهم، حتى في السيناريوهات المعقدة.
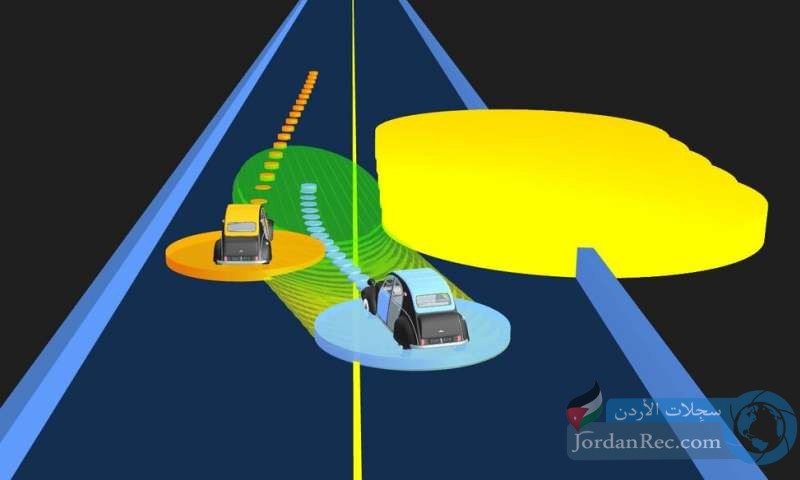
يتكون النظام الذي أنشأه الباحثون من “مقدر”، وهي تقنية لتحديد أهداف السائقين، و “صانع القرار”، وهي خوارزمية تتحكم في زاوية التوجيه وتسريع السيارة ذاتية القيادة. يحدد صانع القرار أنسب المسارات للمركبة بناءً على المعلومات التي يجمعها المقدر.
“في البداية، لا تعرف السيارة ذاتية القيادة أهداف السيارات التي تسير بجانبها، لذلك يقوم المقدر بتخمين أهداف السيارات.” وأوضح Le Cleac’h. “لكل تخمين، تتنبأ السيارة ذاتية القيادة بما سيكون عليه مسار السيارات في الثواني القليلة القادمة؛ ثم تقارن التنبؤات بما حدث في الواقع. يتم الاحتفاظ بالتخمين الأكثر دقة في التنبؤ بالمستقبل.”
بعد هذا التدريب الأولي
عينات LUCIDGames تخمينات جديدة لمسارات العوامل الأخرى التي تكون قريبة جدًا من التخمينات المحتفظ بها وتقييم أداء التنبؤ الخاص بهم. من خلال تكرار هذه العملية عدة مرات في الثانية، فإنها تنقح تخمينها وتخرج بتنبؤ نهائي لكيفية تحرك العوامل الأخرى في محيطها.
وقال لو كليتش: “من خلال أسلوبنا ، تدرك السيارة ذاتية القيادة أيضًا متى يمكن أن تكون واثقة من تخمينها وعندما يكون هناك الكثير من عدم اليقين وتكون الثقة أقل”. “في هذه المواقف غير المؤكدة، ستتخذ إجراءات أكثر حذراً وتحافظ على مسافات أمان أكبر مع المركبات الأخرى.”
عنصر التقدير
في التقنية التي ابتكرها Le Cleac’h وزملاؤه يسمح أيضًا للسيارات ذاتية القيادة بتكييف قراراتها بناءً على نوع السائق الذي تصادفه في الشارع. على سبيل المثال، يمكنه تحديد ما إذا كان السائق عدوانيًا بشكل خاص، مما يسمح لعنصر اتخاذ القرار بتكييف مسارات وحركات السيارة المستقلة وفقًا لذلك (على سبيل المثال، الحفاظ على مسافات أمان أكبر مع السيارة التي يديرها السائق العدواني). بدون تقنية التقدير هذه، ستتحرك السيارة ذاتية القيادة بنفس الطريقة وتقوم بنفس الإجراءات بغض النظر عما إذا كان السائقون في محيطها يتسمون بالحذر أو العدوانية ، مما قد يزيد من مخاطر وقوع الحوادث.
“لقد رأينا أن الجمع بين المفاهيم من نظرية اللعبة والتقدير كان وسيلة فعالة لتوليد سلوكيات قيادة معقدة للسيارة ذاتية القيادة في سيناريوهات يكون فيها التفاعل والتفاوض مع السائقين الآخرين أمرًا أساسيًا،” قال Le Cleac’h. “كانت الخوارزمية الخاصة بنا قادرة على إجراء تقدير واتخاذ قرارات للسيارة ذاتية القيادة على سيناريوهات قيادة واقعية بمعدل سريع بما يكفي لجعلها قابلة للتطبيق في الممارسة.”
في المستقبل، يمكن أن تساعد LUCIDGames في تعزيز سلامة وموثوقية المركبات ذاتية القيادة، مما يسمح لها بالتحرك بطرق تكيفية من خلال توقع تحركات وأفعال الوكلاء في محيطهم. حتى الآن، قام Le Cleac’h وزملاؤه فقط بتقييم التقنية في المحاكاة، لكنهم يخططون الآن لاختبارها على سيارات مستقلة حقيقية.
“بحثنا ممول جزئيًا من قبل معهد أبحاث تويوتا (TRI) ، ونحن نخطط للعمل مع TRI لاختبار LUCIDGames على سياراتهم،” قال Le Cleac’h. “كان مختبرنا (مختبر أنظمة الروبوتات المتعددة في ستانفورد) يختبر بالفعل تفاعلات نظرية الألعاب بين المركبات على طرازات سيارات صغيرة الحجم، وعلى سيارة ذاتية القيادة كاملة النطاق من خلال الشراكة مع مركز أبحاث السيارات في ستانفورد (سيارات). “
يمكن قراءة المزيد من الابتكارات والاختراعات المختلفة من خلال الضغط هنا
للاطلاع على المزيد من المواضيع وأبرز المقالات عبر موقع سجلات الأردن اضغط هنا